第42届ASME机构与机器人年会(ASME Mechanisms & Robotics Conference)暨第13届ASME学生机构与机器人设计大赛(ASME Student Mechanism and Robot Design Competition,SMRDC)的决赛于2018年8月26~29日在加拿大魁北克举行。在决赛决出的6个奖项中,清华大学摩擦学国家重点实验室学生获奖4项,分别为研究生组冠军以及本科生组冠军、亚军和季军。
硕士研究生莫岸的参赛作品“自适应与密点接触抓取的滑杆阵列通用系列抓持器”(Novel Pin Array Universal Grippers for Self-adaptation and Dense-contact Grasping)获得研究生组冠军,完成学生为莫岸、苏靖惟、罗超、付宏,指导教师:张文增。该抓持器在滑杆阵列自适应基础上引入同心对向旋转、非圆截面啮合等策略,研制了滑杆阵列系列抓持器,通过与物体之间密集多点接触达到对不同物体的自适应抓取,抓取效果突出,降低了抓取控制中感知与规划的难度。
莫岸
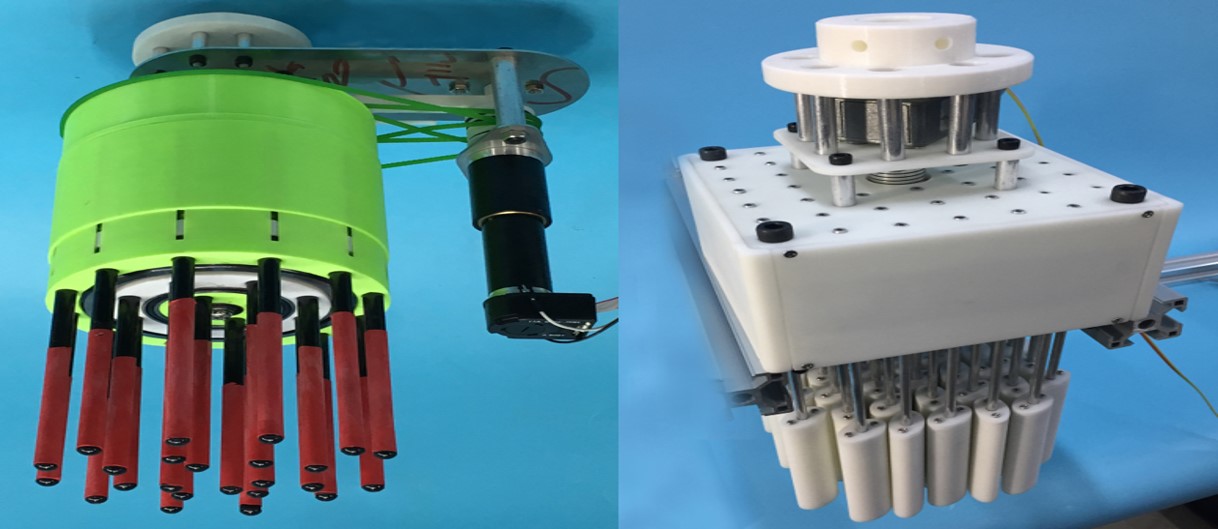
冠军作品:滑杆阵列通用系列抓持器
本科生赵文祥的参赛作品“变几何桁架避障管道机器人”(VGT ROBOT: A Novel Obstacle-avoiding Pipeline Robot with Variable Geometry Truss)获得本科生组冠军,完成学生:赵文祥,何珏威,华国杰,徐雄斌,指导教师:张文增。该机器人采用了一种新型的变几何桁架结构,克服了现有管道机器人无法适应非结构管道的问题,可扩展性高,对于复杂的管道系统具有很强的适应性。
赵文祥
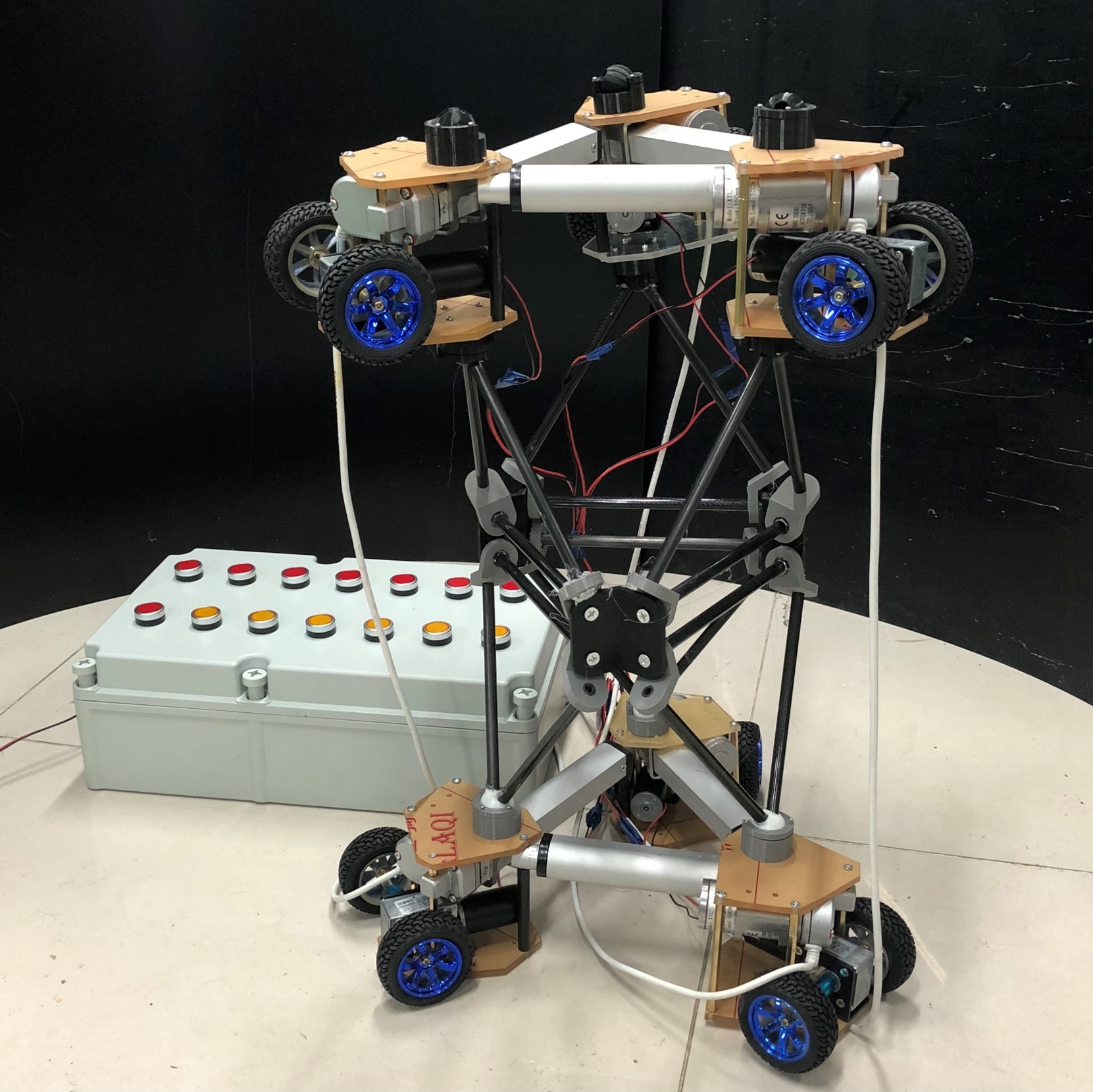
冠军作品:避障管道机器人
2015级本科生、技创辅专业学生杨文昊的参赛作品“带转向机构的气动仿蠕虫爬壁机器人” (A Novel Worm-inspired Wall Climbing Robot with Pneumatic Driving and SteeringMechanisms)获得本科生组亚军,完成学生:杨文昊、杨诚乐、张瑞杰,指导教师:张文增。该项目使用气体动力推动,并采用弹簧-绳复合牵引结构实现了垂直壁面上的直线爬行与自由转向,具有爬行灵活稳定,模块化的特点,大大降低了控制系统的复杂程度。
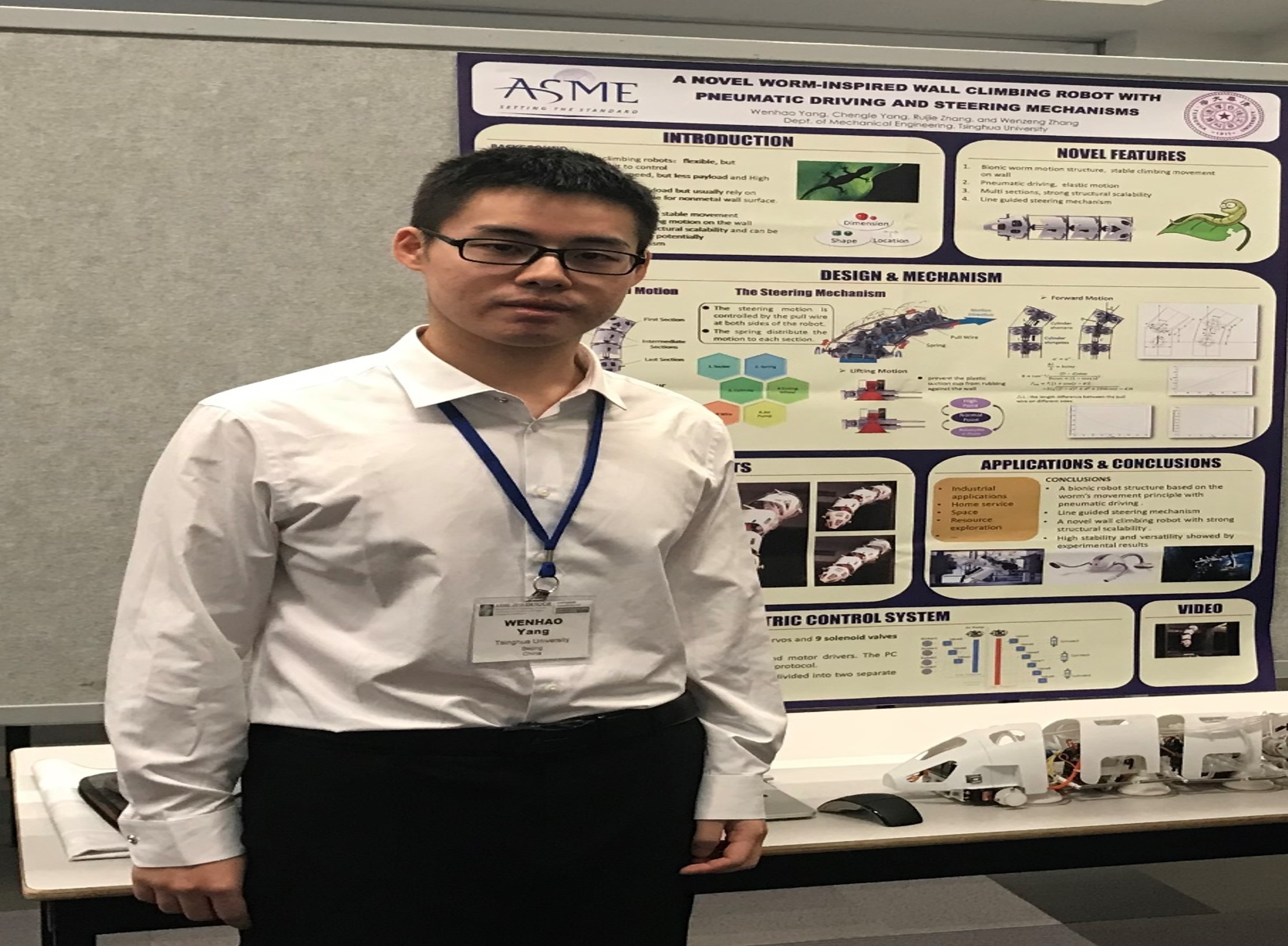
杨文昊
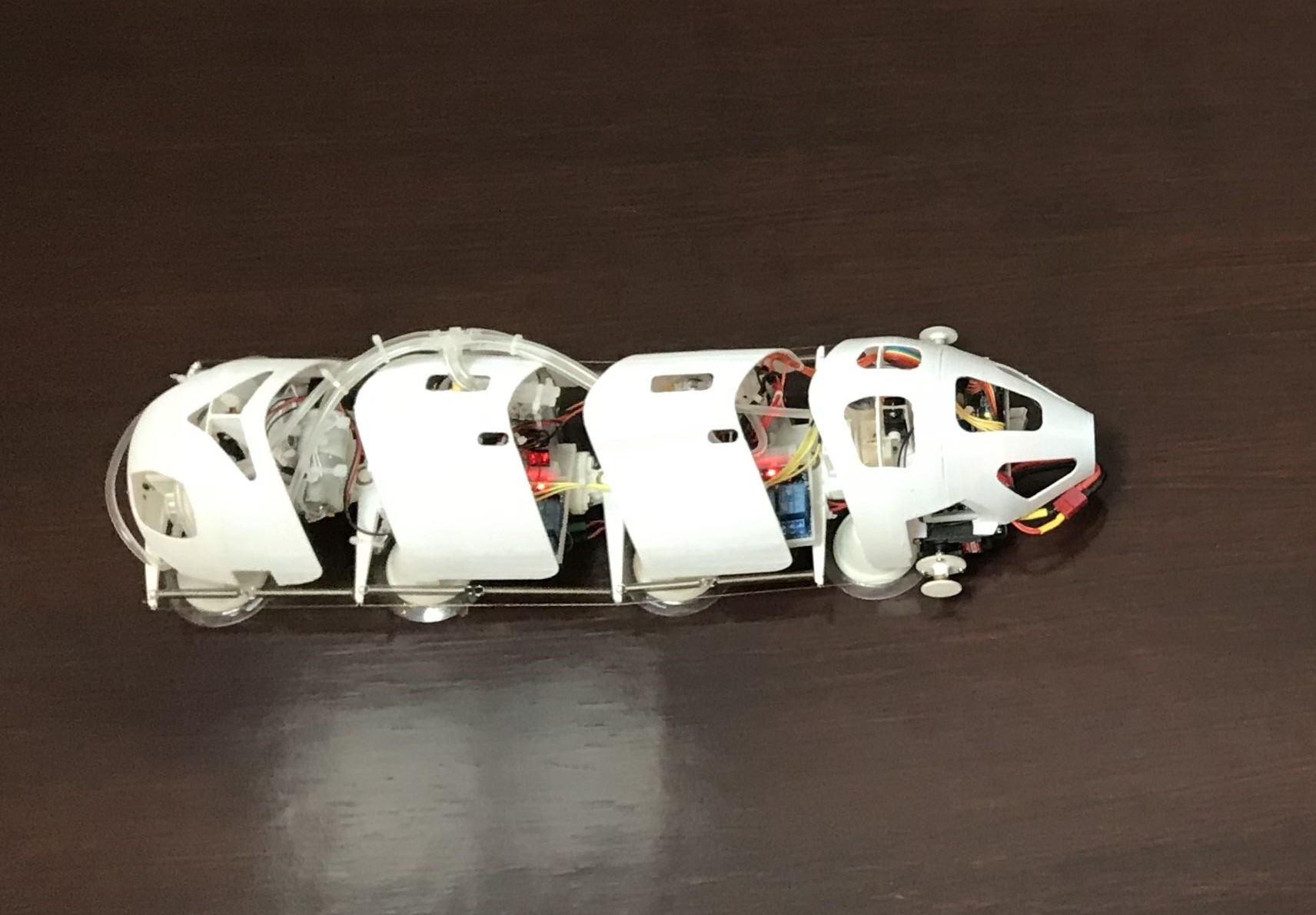
亚军作品:仿蠕虫爬壁机器人
2016级本科生郭晓峰的参赛作品“DSCL机器人手”(DSCL Hand: A Novel Linear Parallel and Self-adaptive Underactuated Robot Hand)获得本科生组季军,完成学生:郭晓峰、项云威、严虎,指导教师:张文增。
该项目设计了一个新型连杆机构,将直线平行夹取与自适应包络抓取两种模式耦合起来,解决了传统自适应手难以抓取薄板物体的问题。
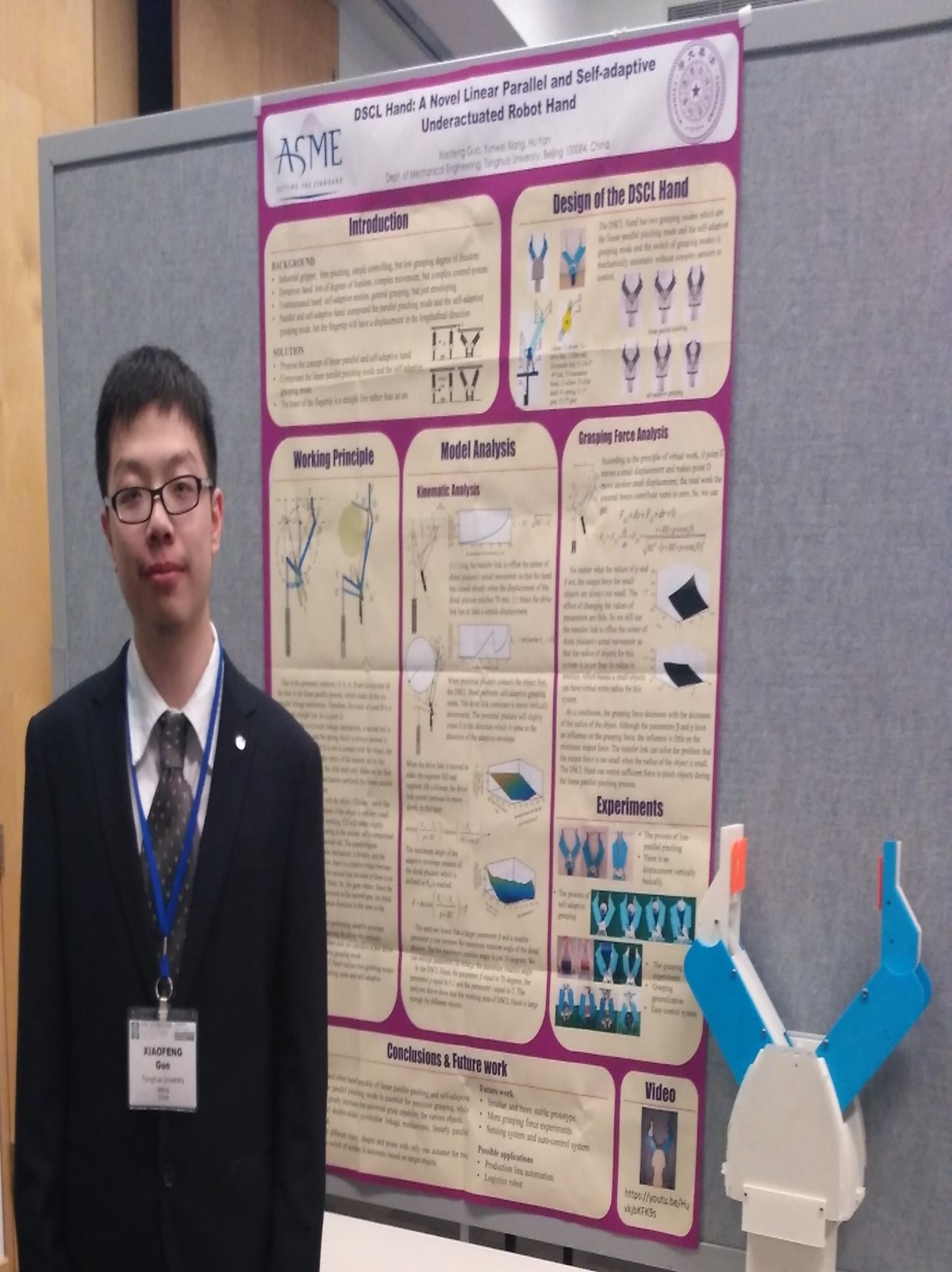
郭晓峰

季军作品:直线平夹自适应机器人手
该竞赛由美国机械工程学会(ASME)和美国自然科学基金委员会(NSF)主办,与ASME国际设计工程技术会议及工程中的计算机与信息会议(IDETC/CIE)同时举行。该竞赛始于2006年,每年举办一次,已成为机构与机器人设计领域非常有影响力的国际学生竞赛,参赛学生来自全世界多个国家和地区,分为“本科生”和“研究生”两个组别。参赛过程包括专家评审、决赛答辩、作品演示和海报展示等多个环节。
迄今为止,清华大学机械工程系张文增老师指导的学生项目已获奖9次:冠军3次(2011、2018)、亚军4次(2010、2012、2016、2018)、季军2次(2015、2018)。清华大学凭9次获奖成为在这项比赛中获奖最多的高校。


