对粘附和摩擦的主动调控是机械手和机器人足等先进智能装备完成表面间抓取、组装、对接、运动等操作的关键技术。壁虎作为自然界飞檐走壁的代表,能够在极短时间内(~20 ms)实现粘附和脱附的转换,从而能够在墙壁和天花板上以高达77 cm/s的速度运动。壁虎对粘附和摩擦的调控能力吸引了大量科学家的注意,使得仿壁虎干粘附技术得到了蓬勃的发展,并有望应用于机械手转运、机器人运动、卫星捕获和太空碎片清理等领域。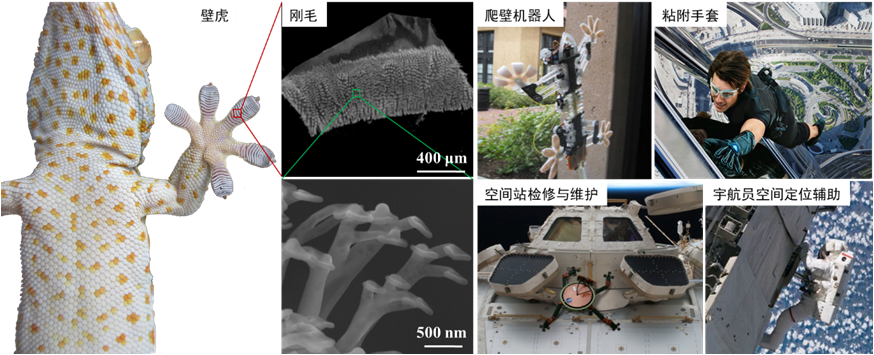
图1.壁虎脚掌的结构(左图);仿壁虎干粘附技术的潜在应用(右图)
仿壁虎干粘附技术的目标是要像壁虎一样自如地调控界面粘附和摩擦,并且在强度、荷载和速度上超越壁虎。如何能够制备出具有类似粘附和摩擦性能的粘附材料?应该采取什么样的调控策略,使其达到强粘附和易脱附的性能?在实际装备应用中,如何协调适应接触、均匀承载和快速脱附之间的关系?这些问题对仿壁虎干粘附的材料制备、性能调控和装备应用技术提出了巨大的挑战。
清华大学摩擦学国家重点实验室田煜教授课题组采用双面曝光的光刻技术制备了蘑菇状仿生表面,并进一步提出金刚石超精密切削的加工技术制备了微楔形仿生表面,解决了仿生表面制备的技术难题。在深入理解仿生粘附力学机理的基础上,田煜教授提出了通过剪切行为、背部刚度和剥离行为调控粘脱附的思路,实现了仿生表面强粘附和易脱附的性能。同时,田煜教授课题组基于仿生粘附技术设计并研制了一系列夹持器和机器人,攻克了装备应用中的接触和承载的协同问题,推动了仿生粘附技术的实际应用。
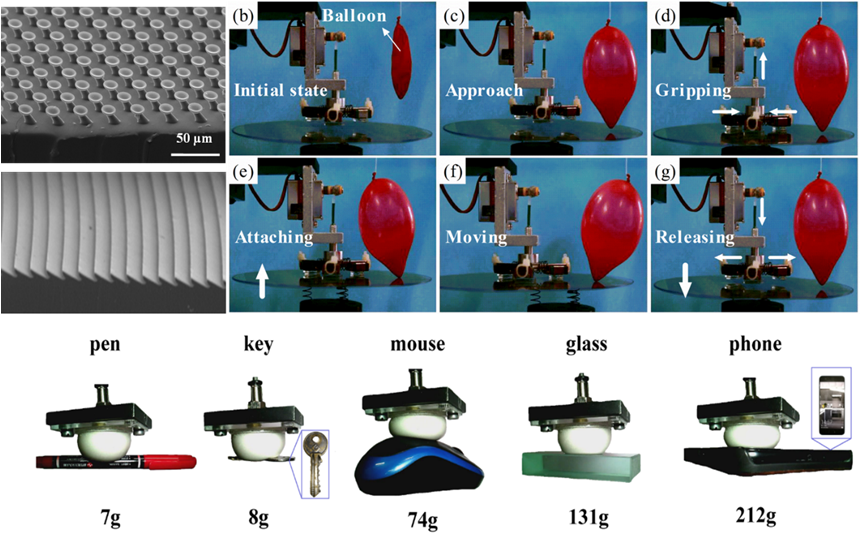
图2.仿壁虎干粘附材料制备及技术应用


