近日,高端装备界面科学与技术全国重点实验室在摩擦电传感用于人机交互领域取得新成果。相关研究成果以“Triboelectric-Inertial Sensing Glove Enhanced by Charge-Retained Strategy for Human-Machine Interaction”为题发表于国际学术期刊《先进科学》(Advanced Science)。机械系2023级硕士生杨博为论文第一作者,程嘉副研究员和博士后曲学铖为论文共同第一作者。
导读:
随着技术的不断进步,人机交互(HMI)领域对直观、自然的交互方式提出了更高的要求。智能手套作为捕捉复杂手部动作的重要工具,逐渐成为推动人机交互发展的关键方向。而基于摩擦电效应的传感器因其自供电、低成本、材料选择灵活等优势,在可穿戴设备领域展现了巨大的应用潜力。然而,由于以往信号采集电路的漏电流导致信号衰减并难以监测连续变化,摩擦电传感器在实际应用中面临着显著瓶颈。因此,开发便携的测量方案以实现对输出电荷的保持和连续信号的稳定监测,已成为亟待解决的技术难题。
针对这一挑战,研究团队提出了一种创新的电荷保持策略,利用基于电荷测量的信号处理电路成功解决了传统电压测量方法下摩擦电传感器的漏电流问题,实现了对连续传感信号的精准捕获。在此基础上,研究团队设计并实现了摩擦电-惯性双模态传感手套(TI-Glove)。该手套通过高度集成的设计,能够实时、便携地支持多功能人机交互。这一研究为摩擦电传感器的便携化应用以及未来人机交互技术的发展提供了新的技术路径。
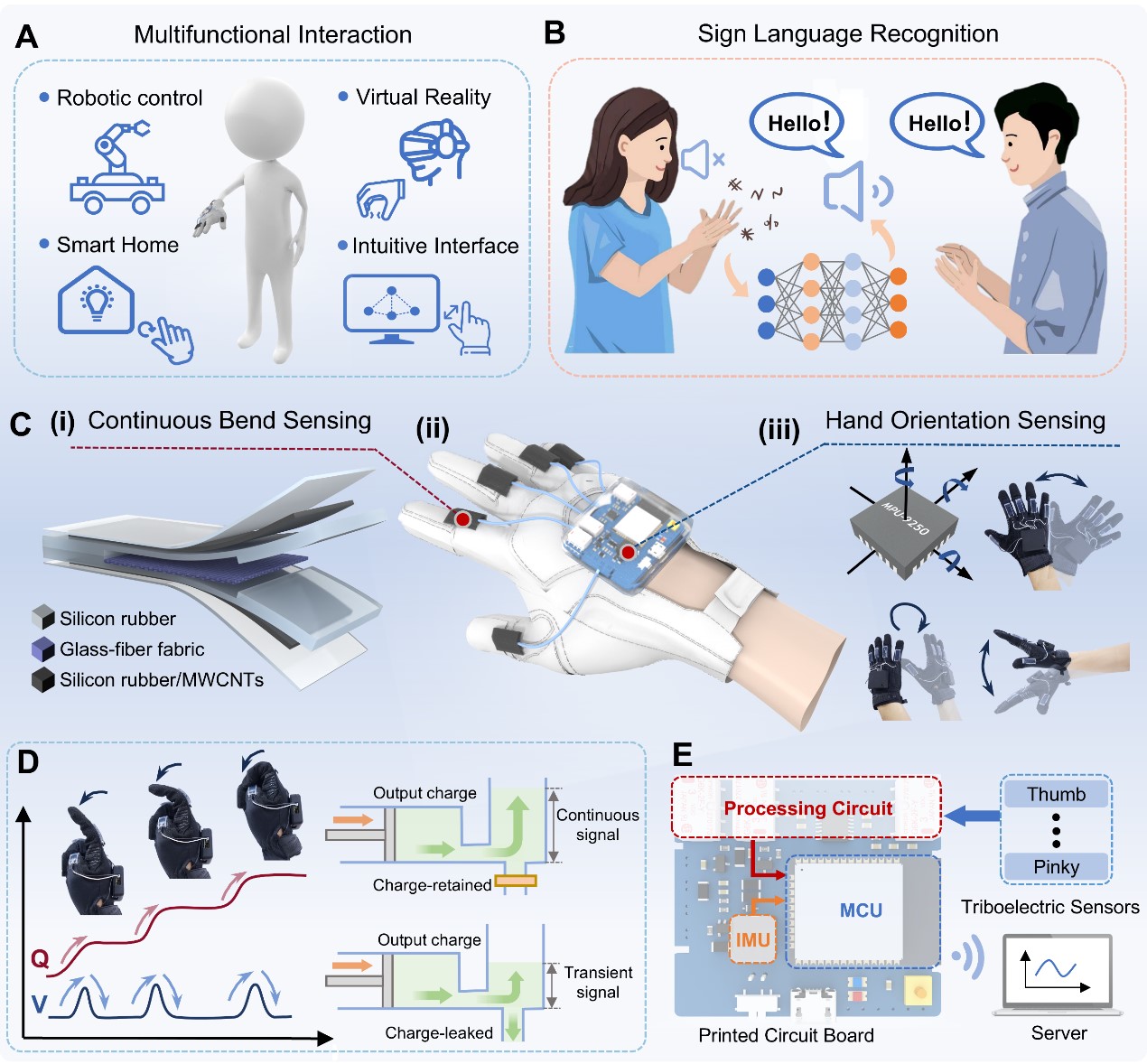
图1. 采用摩擦电-惯性双模传感技术的TI-Glove智能系统。(A)用于机器人控制、虚拟现实、智能家居和直观界面的多功能人机交互系统示意图。(B)手语识别系统示意图。(C) (i)柔性摩擦电传感器的详细结构。(ii)TI-Glove的整体结构。(iii)通过IMU实现的手部方向传感。(D)连续弯曲时摩擦电传感器电荷采集和电压采集方法的信号比较,电荷保持电路可防止摩擦电传感器输出电荷泄漏,从而实现连续信号采集。(E)系统信号流原理框图。
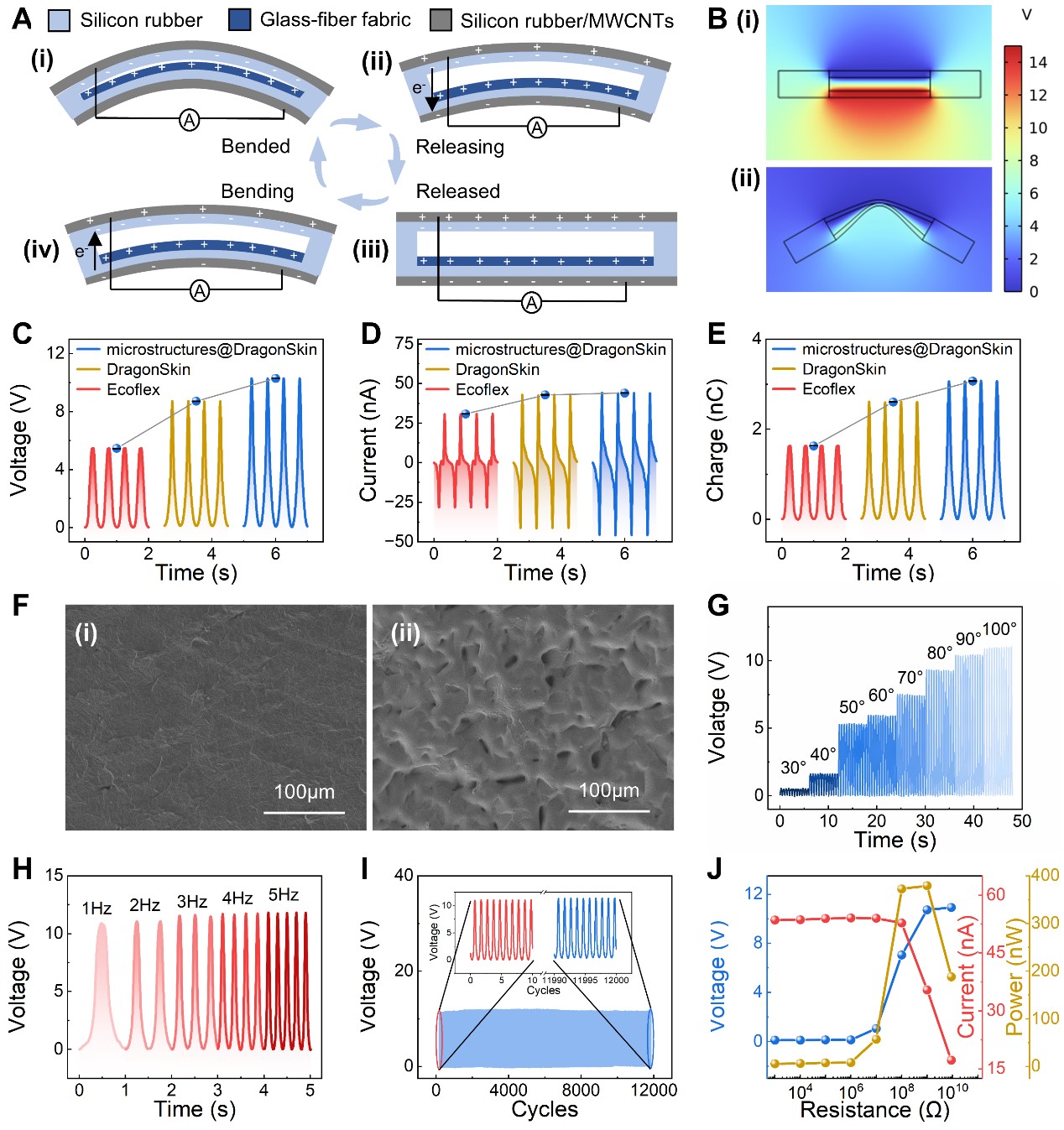
图2. 摩擦电传感器的工作机理和特性。(A)摩擦电传感器的工作原理。(B)摩擦电传感器在(i)释放和(ii)弯曲时的电势分布模拟。(C-E)由Ecoflex、DragonSkin和带有微结构的DragonSkin制备的摩擦电传感器的开路电压、短路电流和转移电荷。(F) (i)平面和(ii)微结构表面的扫描电镜图像。(G)不同弯曲角度下的开路电压。(H)开路电压的频率依赖性。(I)连续弯曲12,000次的机械耐久性测试。(J)电压、电流和功率输出与外部负载电阻的关系。
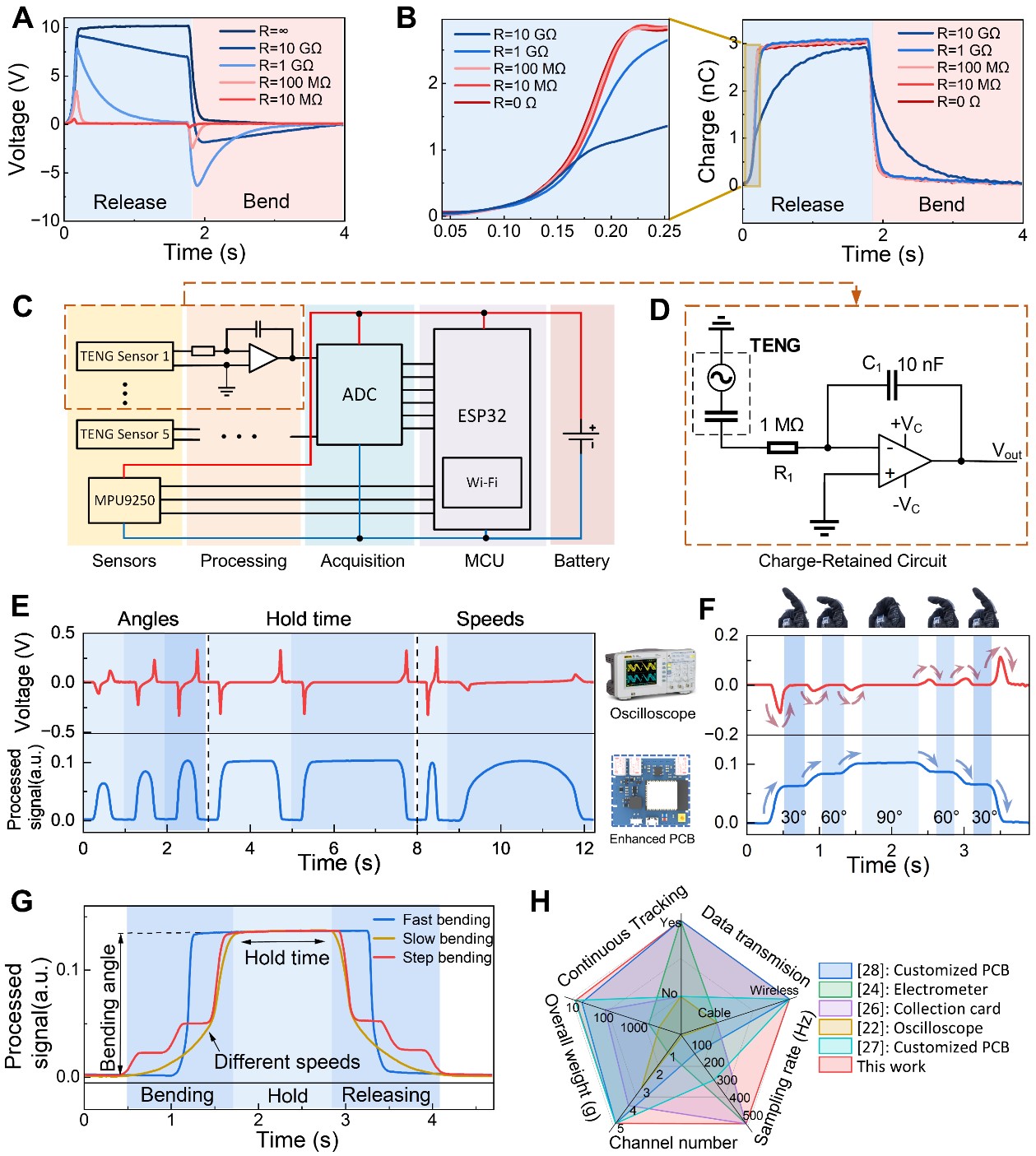
图3. 摩擦电传感信号的分析与便携式采集。(A)和 (B)摩擦电传感器在一个周期内不同外部负载下的输出电压和电荷波形。插图:上升阶段的电荷波形放大图。(C)TI-Glove系统电路图。(D)基于电荷测量策略的摩擦电信号处理电路。(E)在传感器弯曲过程中,通过两种策略在不同角度、保持时间和速度下获取的摩擦电信号比较。上图:示波器测量的输出电压。下图:增强型 PCB 获取的信号。(F)步进弯曲和释放过程中获取的信号比较。(G)从输出信号中提取的弯曲运动的多维特征,包括弯曲角度、保持时间和弯曲速度。(H) 各种摩擦电信号测量方案比较。
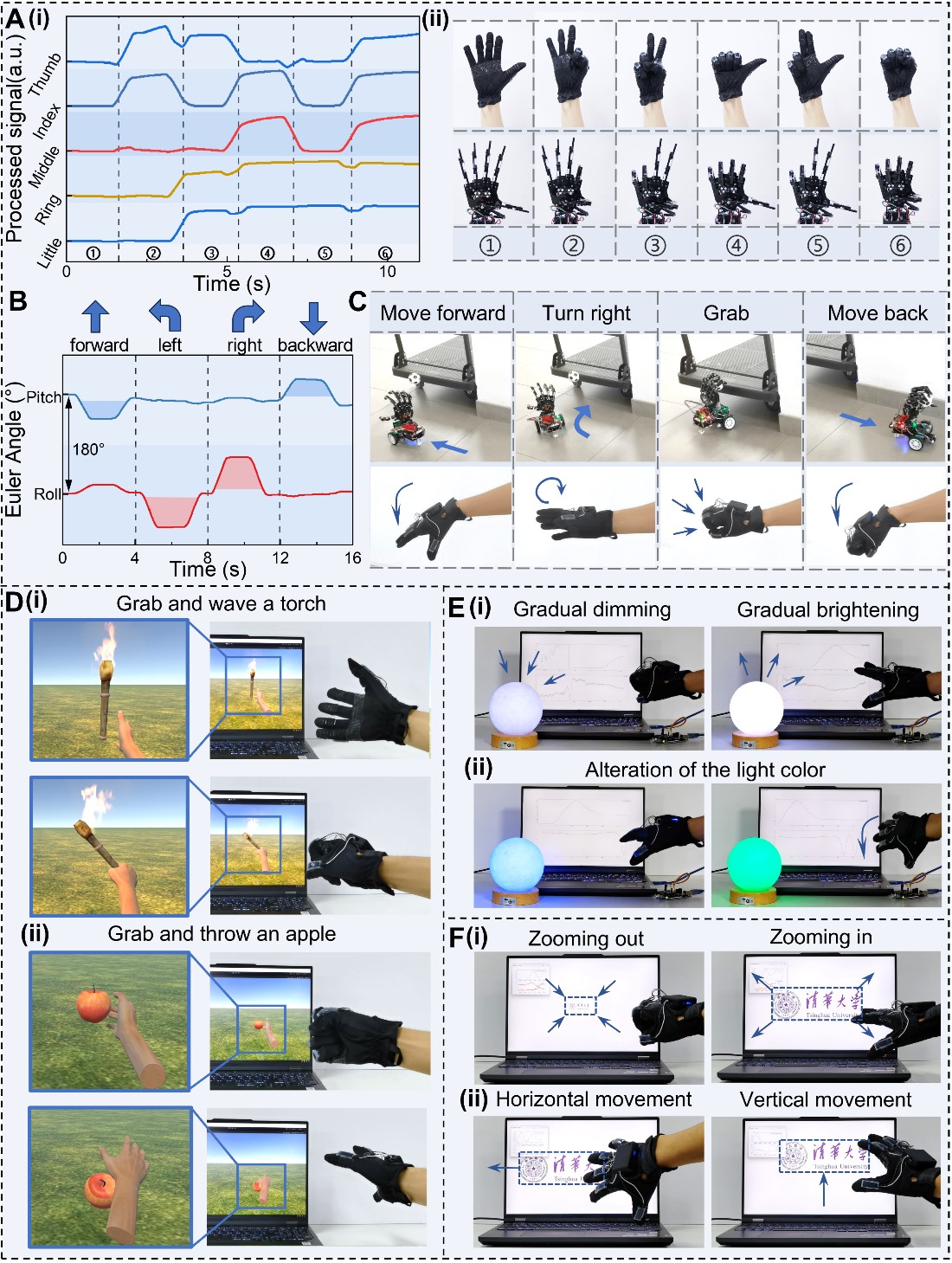
图4. TI-Glove在多功能人机交互中的演示。(A)机器人手部控制。(i)摩擦电传感器在不同手势下的实时信号输出;(ii) 人类手势和对应机器人手部动作的照片。(B)控制机器人前进、后退、左转和右转的IMU信号。(C)机器人移动和抓取控制的综合演示。(D) TI-Glove支持的VR互动,包括(i)抓起并挥舞火炬,(ii)抓起苹果并投掷。(E)灯光演示(i)平滑调节光亮度和(ii)改变灯光颜色。(F)通过手部动作实现直观界面,包括控制图像(i)放大/缩小和(ii)水平/垂直移动。
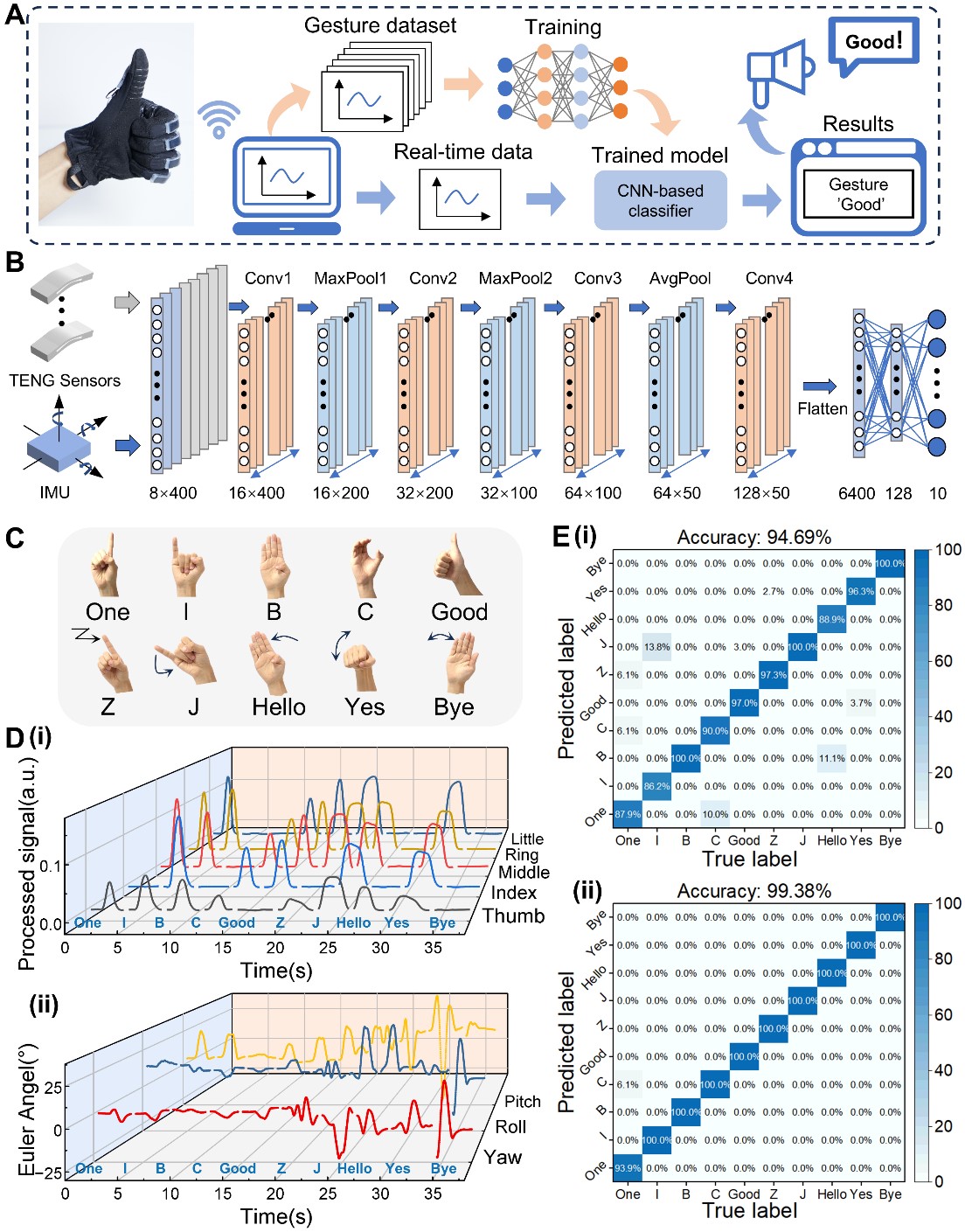
图5. 人工智能支持的手语识别系统。(A)训练和实时手势语识别的流程。(B) CNN 整体结构示意图。(C)选定的 10 种手语手势示意图。上图:只涉及基本手指弯曲的手势。下图:涉及手指弯曲和手掌方向的手势。(D) 数据集中10个手势产生的(i)摩擦电传感器和(ii) IMU 输出信号。(E) (i)仅使用手指弯曲数据和(ii)融合手指弯曲和手部方向数据识别 10 种手势的混淆图。
结论:
该研究构建了一种集成摩擦电和惯性双模态传感的智能手套系统,有效提升了人机交互的直观性与自然性。针对摩擦电传感器信号易因电荷泄漏而衰减的问题,团队设计了一种轻量化的信号处理电路,该电路具备电荷保持功能,可实现连续信号的便携式测量。通过结合摩擦电和惯性传感信号,TI-Glove支持多种人机交互应用,包括机器人高级控制、虚拟现实交互、照明控制及直观界面操作。此外,还开发了一种基于人工智能的手语识别系统,利用摩擦电和惯性传感数据的融合技术,大幅提升复杂手势(如手指弯曲与手部方向)的识别准确性。实验结果表明,该系统对10种手势的识别率高达99.38%。所提出的TI-Glove系统具有设计简洁、成本低廉和集成度高的特点,其中的电荷保持电路为摩擦电传感器的便携式测量方法提供了新的思路。该系统在工业制造、娱乐、智能家居技术以及残障辅助等多个领域展现出广阔的应用潜力。
该研究工作得到了国家自然科学基金、国家重点研发计划、博士后科学基金等项目的支持。
原文链接:https://doi.org/10.1002/advs.202408689


