据中国载人航天工程办公室消息,北京时间2024年1月17日22时27分,搭载天舟七号货运飞船的长征七号遥八运载火箭,在我国文昌航天发射场点火发射,约10分钟后,天舟七号货运飞船与火箭成功分离并进入预定轨道,之后飞船太阳能帆板顺利展开,发射取得圆满成功。天舟七号货运飞船入轨后顺利完成状态设置,于北京时间2024年1月18日1时46分,成功对接于空间站天和核心舱后向端口。
天舟七号货运飞船舱体长度超过6m、最大直径超过3m,其高效高质量加工是一个世界性难题。为解决这个难题,清华大学高端装备界面科学与技术全国重点实验室刘辛军教授团队从自然界生命体作业方式寻找灵感,受长颈象鼻虫筑茧、啄木鸟啄木、手工艺师雕刻作品等“移动定位、局部精细化作业”的普遍现象受到启发,率先提出了“大范围定位+局部五轴精雕细刻”的生命体行为仿生作业模式,可实现工件保持不动、加工设备移动作业的原位加工。进一步,应用并联机构学原理,发明了一种兼具轻量化和高效高精性能的五自由度并联机构,进而借鉴类似于人手的功能,把这个可实现五轴运动的并联机构作为机械手,创新性的设计并研制了一种移动式混联加工机器人(如图1所示),它由可大范围移动的AGV、并联结构的高刚度两自由度机械臂和五自由度并联机构模块三部分构成。

图1 一种“大范围定位+局部五轴精雕细刻”的移动式混联加工机器人
在需要对构件的某局部特性进行加工时,AGV首先在iGPS的引导下移动到待定位置,然后支点及辅助机构支撑住AGV底盘使其固定,接着摆动机械臂到一定位置并锁死驱动电机,这样AGV和机械臂就可以构成一个高刚度的支撑结构。AGV和机械臂准备就绪后,末端的并联运动机械手在视觉/触觉等的感知下,确定好刀具与被加工特征的相对位姿,就可以对局部特征进行加工,在直径300mm范围内局部最大误差可控制在0.04mm以内,在6m尺度范围内全局加工精度可达0.1mm。由于这种移动式机器人的末端是一个可实现精细化作业的机械手,它能够完成像一名工匠一样作业的加工任务,因此这种移动式混联加工机器人也被称为“机器工匠”。
这种“机器工匠”的发明和研制,解决了天舟七号货运飞船舱体和舱段的原位高效高质量制造难题(图2),在提升航天产品自主制造能力上向前迈进了一大步,也可推广应用到盾构、燃气轮机、航空等领域。
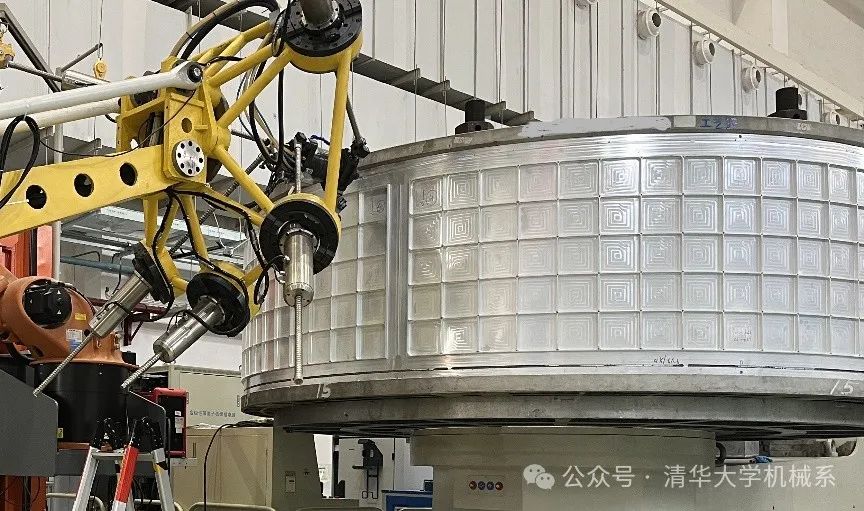
图2 “机器工匠”用于构件的精雕细刻
相关工作得到了国家自然科学基金委“共融机器人基础理论与关键技术研究”重大研究计划、国家智能机器人重点研发计划和北京市科技计划智能制造技术创新与培育专项等项目的支持。


